Stimulation magnétique transcrânienne robotisée
Opération 24: Stimulation magnétique transcrânienne robotisée (LSIIT, IPB-LINC, INSA, INSERM U666)
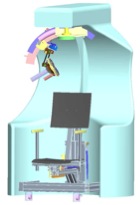


Prototype de système robotique de stimulation magnétique transcrânienne et sonde de stimulation
La Stimulation Magnétique Transcrânienne (SMT) est une méthode non-invasive qui permet de déclencher une activité électrique dans le cortex. Elle consiste à déplacer à la surface du crâne une sonde qui génère des micro-impulsions magnétiques induisant des impulsions électriques dans le cerveau. Son influence a déjà été mise en évidence pour le traitement de la dépression, et des études sont en cours pour le traitement d’autres pathologies telles que les troubles anxieux post-traumatiques ou la schizophrénie. Cette méthode n’est pas encore largement répandue car la sonde est déplacée manuellement par le neurologue d’où une précision et une répétabilité trop faibles pour permettre une évaluation clinique rigoureuse. En outre, un traitement manuel ne peut pas être envisagé dans le cadre d’une routine clinique à cause de la durée d’une séance. Une procédure de SMT assistée par un système robotique doit donc permettre d’une part une meilleure évaluation de la technique et par ailleurs de développer ce type de traitement pour en faire un geste routinier.
Le projet de SMT robotisée, débuté dans le précédent PPF, a permis de développer un système innovant pour générer des procédures de SMT routinières, en combinant précision de traitement, sécurité du patient et confort du praticien. Pour cela, une structure robotique originale a été conçue, afin de pouvoir agir sur l’ensemble des zones susceptibles d’être traitées par SMT. La structure permet la réalisation d’un geste précis et sûr, par l’intégration de dispositifs de sécurité et l’utilisation d’une structure cinématique originale évitant les risques de chocs entre le robot et le patient. Des développements logiciels ont eu lieu en parallèle afin de mettre en place la chaîne de traitement, depuis les images provenant d’IRM et IRMf jusqu’à la définition de trajets de stimulation sur la tête du patient. Ces trajets seront effectués en assurant un recalage en temps réel de la position et de l’orientation de la sonde par rapport au patient, grâce à l’utilisation d’un localisateur optique détectant ses mouvements. Le système assure en même temps le confort du patient et sa sécurité en contrôlant l’effort exercé par la sonde sur sa tête.
Toutes les solutions, matérielles et logicielles, sont actuellement en cours d’implantation sur un premier démonstrateur, devant permettre d’effectuer des validations sur mannequin et des tests cliniques. Le projet va ensuite se développer selon deux axes. Premièrement, il s’agira de participer à une évaluation clinique fiable de la SMT. Il est en effet nécessaire de préciser l’applicabilité de la technique, afin de préciser les indications médicales. Dans le même temps, il s’agira de faire évoluer le premier démonstrateur grâce à un retour d’usage, pour tendre vers une version du système industrialisable sur le plan de ses fonctionnalités et de sa conception.