Radiologie interventionnelle robotisée
Opération 22 : Radiologie interventionnelle robotisée (LSIIT, IMFS, IRCAD, INSA)
Ce projet a pour objectif de proposer un système robotique de destruction des tumeurs par procédure percutanée, piloté par imageur X ou IRM pour les cancers de l’appareil digestif à fin d’améliorer la précision du geste. En effet, les nouvelles techniques percutanées qui consistent à brûler les tumeurs par l’intermédiaire d’une aiguille plantée au travers de la peau en son centre à l’aide de radiofréquences ou par cryogénisation manquent de précision. Notre objectif est d’atteindre les tumeurs de toutes dimensions dès quels sont visibles sur l’image du scanner ou de l’IRM. Pour y parvenir, il est nécessaire de réaliser un système de guidage robotisé performant et précis utilisant l’imagerie médicale pré et per-opératoire. Ce système doit servir au pointage de l’aiguille et doit être téléopéré si possible avec retour d’effort s’il enfonce les aiguilles.

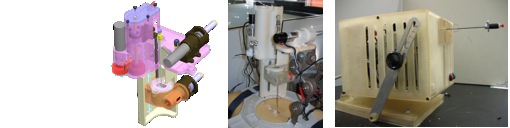
a) le système de positionnement CT-Bot – b) et c) le prototype de système d’enfoncement d’aiguille avec retour d’effort – d) l’interface dédiée CT-Master pour la téléopération de l’enfoncement de l’aiguille
Pour ce projet, nous avons conçu un premier système robotique d’insertion d’aiguille à l’intérieur d’un scanner X pour des procédures percutanées. Ce système respecte les contraintes difficiles de la salle d’opération et du scanner : faible encombrement, non opacité, stérilité et bien évidemment sécurité du patient, en particulier compatibilité avec la respiration. Ce système, piloté par une interface haptique spécialement conçue, permet au radiologue d’éviter l’exposition aux rayonnements tout en conservant un retour sensoriel. Parmi les aspects remarquables du projet, il faut noter le positionnement planifié du robot et des différents systèmes de mesure et l’asservissement visuel du robot à l’aide d’images scanner. Les développements dans le cadre de ce projet ont déjà fait l’objet de 2 dépôts de brevets depuis 2005. Le premier prototype de système téléopéré est actuellement en cours d’expérimentation (voir figure 17). Des modèles biomécanique d’interaction avec les tissus mous sont utilisés pour améliorer la transparence du dispositif. Avec l’installation d’une IRM pour la radiologie interventionnelle prévue en 2008, nous avons également le projet de développer un assistant robotique compatible IRM.