Métrologie temps-réel in vivo
Opération 20 : Métrologie temps-réel in vivo (LSIIT, LSP, IRCAD)
Dans le cadre de ce projet pluri-disciplinaire entre la vision robotique et la photonique, nous nous intéressons plus particulièrement à la conception et à la réalisation d'un endoscope, basé sur la projection d'une lumière structurée, dans le but d'obtenir des reconstructions 3D très précises des structures internes de l'abdomen en temps réel. A l'heure actuelle, de telles reconstructions peuvent déjà être obtenues grâce à des dispositifs d'imagerie médicales (scanner par exemple). Cependant, l'utilisation en temps réel de cette imagerie, dans le contexte d'une opération reste limitée. Pour pallier ces inconvénients, il serait souhaitable de disposer d'un dispositif endoscopique, fournissant en temps réel la connaissance tridimensionnelle de l'environnement proche de l'instrument chirurgical. L'obtention de cette information ouvrirait de nouvelles perspectives. Une première application consisterait à restituer la profondeur de l'environnement au chirurgien, en superposant des indices visuels de profondeur. Dans ce cas, la perception 3D endoscopique aurait un intérêt en terme de réalité augmentée. Une seconde application consisterait à utiliser la connaissance 3D en temps réel de la cavité abdominale pour accomplir des actes chirurgicaux robotisés. L'objectif de ce travail est donc de concevoir et de réaliser un endoscope capable de fournir des reconstructions 3D précises des structures internes de l'abdomen en temps réel, dans le but de l'intégrer dans des systèmes robotiques. Les applications du travail concerneront plus particulièrement la commande de robots de chirurgie laparoscopique et l'endoscopie flexible.


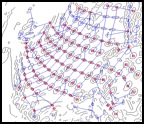
Projection de lumière structurée codée sur une surface déformable et reconstruction en temps-réel
Pour ce faire, une projection de lumière structurée est utilisée pour mettre au point le processus de mesure tridimensionnelle. Les travaux menés actuellement au sein de l'équipe AVR ont déjà permis de définir de nouveaux motifs lumineux permettant de reconstruire de manière robuste des surfaces complexes correspondant aux structures internes de l'abdomen. Les premiers résultats de reconstruction 3D obtenus avec ces nouveaux motifs et les méthodes de codage et décodage associées sont très prometteurs et représentent une excellente solution alternative aux méthodes de projection de lumière structurée standards dont l'utilisation reste limitée à des cas simples. D'autre part, pour pouvoir intégrer le système de reconstruction 3D dans un dispositif endoscopique miniaturisé, il est impossible d'utiliser des techniques optiques classiques. A cet effet, l'utilisation d'optiques diffractives spécifiques est en cours de développement en collaboration avec le LSP, de manière à pouvoir appliquer les motifs lumineux développés aux applications envisagées, tout en autorisant une miniaturisation du dispositif de projection de manière à pouvoir l'intégrer dans un système endoscopique.