Différences entre les versions de « Planification opératoire »
| Ligne 1 : | Ligne 1 : | ||
| − | '''Opération | + | '''Opération 14: Planification opératoire (LSIIT, IRCAD)''' |
[[Image:Planif1.jpg]] | [[Image:Planif1.jpg]] | ||
Version du 8 février 2010 à 18:29
Opération 14: Planification opératoire (LSIIT, IRCAD)
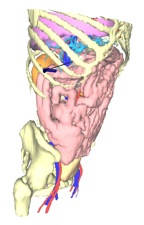
Planification d’une trajectoire d’aiguille de radiofréquence
L'idée générale de ce thème est d'assister le chirurgien dans la planification du geste chirurgical qu'il doit accomplir, à la fois en lui proposant une meilleure visualisation 3D préopératoire de l'anatomie du patient et de ses pathologies, mais surtout en lui suggérant des stratégies optimales calculées automatiquement. Ce projet recouvre trois aspects : l'acquisition des données, la génération des solutions, la prise de connaissance de ces solutions. Dans ce projet, nous nous intéresserons plus particulièrement dans un premier temps à des opérations percutanées, notamment les opérations de thermo-ablation de tumeurs hépatiques, qui nous permettra de tester et de valider notre outil sur des cas réels, en collaboration avec l'Hôpital Civil de Strasbourg. Cependant, nous souhaitons qu'à terme l'outil puisse être suffisamment générique pour pouvoir être utilisé pour tout type d'opération percutanée, sur toute partie du corps, ou même encore pour d'autres types d'opérations de thermo-ablation comme la radiothérapie, mettant en jeu des règles pouvant être exprimée sous forme de contraintes géométriques, comme c'est le cas pour les opérations percutanées.
Pour le premier des 3 aspects de notre projet, l'acquisition des données, une partie de ces données est constituée de l'image du patient acquise sous imageur. Mais il est également nécessaire de connaître les règles de l'art qui régissent ces opérations, qui constituent un 2ème type de données, et de les formaliser. Nous utiliserons la modélisation déclarative pour l'expression de l'ontologie tirée de l'expertise du praticien afin d'obtenir une représentation plus formelle, plus explicite de la connaissance chirurgicale, et d'améliorer la compréhension de la procédure chirurgicale et du flux d'information et d'action. Ensuite, la partie génération de solutions sera traitée par un solveur de contraintes géométriques, qui se chargera de proposer des solutions optimales pour les données fournies.
Enfin, pour la partie prise de connaissance des solutions, il s'agira non seulement d'afficher la solution optimale trouvée, mais également pour plus de souplesse de proposer d'une part un moyen de matérialiser les propriétés des espaces de solutions entourant la solution optimale, et d'autre part de naviguer dans cet espace de solutions afin de permettre au praticien de modifier cette solution s'il le souhaite. Dans ce contexte, l'utilisation d'interfaces à retour d'effort pourra être utile afin d'éviter une trop grande surcharge visuelle. L'objectif de ce travail est de concevoir et réaliser un outil générique, modulable, et complet de planification automatisé, spécifique à chaque patient, et même à chaque praticien, ceux-ci ayant parfois des méthodologies différentes et donc imposant des contraintes différentes.